A few more words to describe what I did to revive the Bigfoot. The Arduino software is Soarer_Controller_v1.20_beta4, and I use Ubuntu Trusty 14.04 to compile the tools and to upload the software.
The inspiration came from Laser, and
IBM Model F Bigfoot with arduino micro, win7 64bit. Thanks Laser.
Installation of software tools in Ubuntu:
Code: Select all
sudo apt-get update && sudo apt-get install arduino arduino-core libusb-dev
I use the
Arduino Micro, simply because I happen to have one to hand. Soarer's Controller is written for the Teensy, but it seems that it might operate on any ATMEL based hardware.
Take a snapshot of the TTY devices and the USB devices before plugging in the Arduino:
Code: Select all
ls -1 /dev/tty* > Before-tty
lsusb > Before-USB
Plug in the Arduino and take another snapshot:
Code: Select all
ls -1 /dev/tty* > After-tty
lsusb > After-USB
Show the differences:
Code: Select all
diff Before-USB After-USB
6a7
> Bus 002 Device 017: ID 2341:8037 Arduino SA
diff Before-tty After-tty
65a66
> /dev/ttyACM0
Unpack
Soarer's Keyboard Controller firmware
Code: Select all
mkdir "Soarer's Converter"
cd "Soarer's Converter"
unzip ../Soarer_Controller_v1.20_beta4.zip
tar -zxf Soarer_sctools_v1.20_beta4_linux.tar.gz
This is what the 'tree' command reveals:
Code: Select all
tree
.
├── configs
│ ├── 6112884.sc
│ ├── bigfoot.sc
│ ├── kevex-blank.sc
│ ├── kevex-retrete.sc
│ └── mini_matrix.sc
├── docs
│ ├── controller.html
│ ├── images
│ │ └── bullet.png
│ └── style1.css
├── firmware
│ ├── Soarer_Controller_v1.20_beta4_at90usb1286.hex
│ ├── Soarer_Controller_v1.20_beta4_at90usb646.hex
│ └── Soarer_Controller_v1.20_beta4_atmega32u4.hex
└── tools
├── scas
├── scboot
├── scdis
├── scinfo
├── scrd
├── scwr
├── Soarer_sctools_v1.20_beta4_linux.tar.gz
├── Soarer_sctools_v1.20_beta4_macosx.tar.gz
├── Soarer_sctools_v1.20_beta4_source.zip
└── Soarer_sctools_v1.20_beta4_win32.zip
5 directories, 21 files
Program the Arduino with the precompiled firmware, specifying the correct device for the -P option, in this example /dev/ttyACM0:
Code: Select all
cd firmware
sudo avrdude \
-p atmega32u4 \
-P /dev/ttyACM0 \
-c avr109 \
-U flash:w:Soarer_Controller_v1.20_beta4_atmega32u4.hex
The 'sudo' part is necessary, otherwise the following error is the result:
Code: Select all
avrdude: ser_open(): can't open device "/dev/ttyACM0": Permission denied
It also may be necessary to add 'dialout' group to the login account, and to log-out and log-in again to make the change take effect:
An example of the output of 'avrdude':
Code: Select all
$> avrdude -p atmega32u4 -P /dev/ttyACM0 -c avr109 -U flash:w:Soarer_Controller_v1.20_beta4_atmega32u4.hex
Connecting to programmer: .
Found programmer: Id = "CATERIN"; type = S
Software Version = 1.0; No Hardware Version given.
Programmer supports auto addr increment.
Programmer supports buffered memory access with buffersize=128 bytes.
Programmer supports the following devices:
Device code: 0x44
avrdude: AVR device initialized and ready to accept instructions
Reading | ################################################## | 100% 0.00s
avrdude: Device signature = 0x1e9587
avrdude: NOTE: "flash" memory has been specified, an erase cycle will be performed
To disable this feature, specify the -D option.
avrdude: erasing chip
avrdude: reading input file "Soarer_Controller_v1.20_beta4_atmega32u4.hex"
avrdude: input file Soarer_Controller_v1.20_beta4_atmega32u4.hex auto detected as Intel Hex
avrdude: writing flash (17726 bytes):
Writing | ################################################## | 100% 1.32s
avrdude: 17726 bytes of flash written
avrdude: verifying flash memory against Soarer_Controller_v1.20_beta4_atmega32u4.hex:
avrdude: load data flash data from input file Soarer_Controller_v1.20_beta4_atmega32u4.hex:
avrdude: input file Soarer_Controller_v1.20_beta4_atmega32u4.hex auto detected as Intel Hex
avrdude: input file Soarer_Controller_v1.20_beta4_atmega32u4.hex contains 17726 bytes
avrdude: reading on-chip flash data:
Reading | ################################################## | 100% 0.14s
avrdude: verifying ...
avrdude: 17726 bytes of flash verified
avrdude: safemode: Fuses OK (H:CB, E:D8, L:FF)
avrdude done. Thank you.
Soarer's tools, 'scinfo', 'scas' etc are offered with source code. The precompiled tools are 32-bit versions, which don't work on 64-bit Ubuntu unless a pile of 32-bit libraries are installed. I decided to recompile these tools for my 64-bit Ubuntu installation instead:
Code: Select all
cd Soarer_Controller_v1.20_beta4/tools
mkdir SOURCE
cd SOURCE
unzip ../Soarer_sctools_v1.20_beta4_source.zip
cd build/linux
make
Check the result with Soarer's tools:
An example of what to expect:
Code: Select all
cd Soarer_Controller_v1.20_beta4/tools
$> sudo ./scinfo
[sudo] password:
scinfo v1.10
scinfo: looking for Soarer's Converter: found
scinfo: sending info request: ok
device: ok
Protocol Version: v1.00
Code Version: v1.20
Max Settings Version: v1.03
Current Settings Version: v0.00
SRAM Size: 2560 bytes
SRAM Free: 1793 bytes
EEPROM Size: 1024 bytes
EEPROM Free: 1020 bytes
Now to upload the configuration file. The `scaswr.bat` file in the Win32 archive shows what to do. First compile the configuration file to binary using 'scas':
Code: Select all
cd Soarer_Controller_v1.20_beta4/tools/SOURCE/bin
./scas ../../../configs/bigfoot.sc ../../../configs/bigfoot.scb
Example output:
Code: Select all
scas v1.20
No errors. Wrote: ../../../configs/bigfoot.scb
Next, write the compiled configuration to the Arduino with the 'scwr' tool:
Code: Select all
sudo ./scwr ../../../configs/bigfoot.scb
Output:
Code: Select all
scwr v1.10
scwr: looking for Soarer's Converter: ../common/hid_LINUX.c:175, vid=16c0 pid=47d
rawhid_open, max=1
device: vid=16C0, pic=047D, with 4 iface
type 3, 1, 1
type 3, 0, 0
IN endpoint 3
hid interface (generic)
descriptor, len=21
tag: 4, val FF31
tag: 8, val 74
type 3, 0, 0
IN endpoint 2
hid interface (generic)
descriptor, len=220
tag: 4, val 1
tag: 8, val 6
type 3, 0, 0
IN endpoint 4
OUT endpoint 5
hid interface (generic)
descriptor, len=28
tag: 4, val FF99
tag: 8, val 2468
found
scwr: reading file: 118 bytes: ok
scwr: sending info request: ok
device: ok
protocol version check: converter=1.00, scwr=1.00: ok
settings version check: converter=1.03, file=1.03: ok
settings length check: max=1018, file=116 bytes: ok
scwr: sending write request for 116 bytes: ok
device: ok
device: ready
scwr: sending 60 bytes: ok
device: ok
device: ready
scwr: sending 56 bytes: ok
device: ok
device: complete
Note that the debugging output is enabled in the example above. In the file tools/SOURCE/common/hid_LINUX.c:
Code: Select all
#define printf(...) // comment this out for lots of info
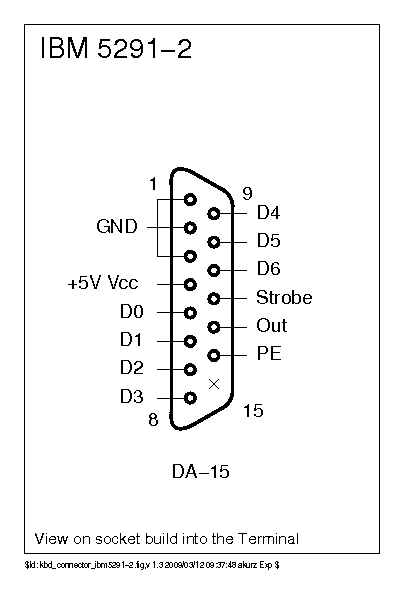
Connect the Arduino to the
IBM Bigfoot DB15 cable. The second column "Pin" is the IBM pin numbering on the Logic Board. The 5291 Maintenance Library manual shows that the IBM numbering convention is different to IDC convention, so be aware!
Code: Select all
| DB15 Pin | Pin | Duty | Atmel |
|----------|-----|----------------|-------|
| 1 | 20 | GND | |
| 2 | 18 | GND | |
| 3 | 12 | GND | |
| 4 | 13 | +5V | |
| 5 | 17 | Count 1 | PB0 |
| 6 | 1 | Count 2 | PB1 |
| 7 | 3 | Count 4 | PB2 |
| 8 | 4 | Count 8 | PB3 |
| 9 | 8 | Count 16 | PB4 |
| 10 | 9 | Count 32 | PB5 |
| 11 | 10 | Count 64 | PB6 |
| 12 | 19 | Matrix Strobe | PD1 |
| 13 | 11 | +Key Depressed | PD0 |
| 14 | 14 | Frame Ground | |
| | 2 | Not Used | |
| | 5 | Not Used | |
| | 6 | Not Used | |
| | 7 | Not Used | |
| | 15 | Not Used | |
| | 16 | Not Used | |
I used a DB15 socket salvaged from an ancient PC ISA sound card, which had a DB15 joystick port. The pin numbers on that are also rearranged, so I needed to expand the table above:
Code: Select all
| Ribbon | DB15 Pin | Duty | Atmel pin | Arduino micro pin |
|--------|----------|----------------|-----------|-------------------|
| 1 | 1 | GND | | |
| 2 | 9 | Count 16 | 28 PB4 | J5-13 IO8 |
| 3 | 2 | GND | | |
| 4 | 10 | Count 32 | 29 PB5 | J5-14 IO9 |
| 5 | 3 | GND | PAD GND | J6-04 GND |
| 6 | 11 | Count 64 | 30 PB6 | J5-15 IO10 |
| 7 | 4 | +5V | 34 +5V | J6-06 +5V |
| 8 | 12 | Matrix Strobe | 19 PD1 | J5-07 D2/SDA |
| 9 | 5 | Count 1 | 8 PB0 | J5-02 RXLED/SS |
| 10 | 13 | +Key Depressed | 18 PD0 | J5-08 D3/SCL |
| 11 | 6 | Count 2 | 9 PB1 | J6-01 SCK |
| 12 | 14 | Frame Ground | | |
| 13 | 7 | Count 4 | 10 PB2 | J5-01 MOSI |
| 14 | 15 | Not Used | | |
| 15 | 8 | Count 8 | 11 PB3 | J6-02 MISO |
The complete picture of connections to the Arduino:
Code: Select all
Ribbon Duty Atmel Arduino Arduino Atmel Duty Ribbon
+-------+
13 Count 4 PB2 MOSI |# | SCK PB1 Count 2 11
9 Count 1 PB0 RXLED/SS | | MISO PB3 Count 8 15
PD3 D1/TX | | VIN
PD2 D0/RX | | GND Frame+GND 5+12
RESET | | RESET
1+3 Ground GND | | 5V +5V 7
8 Matrix Strobe PD1 D2 | |
10 Key Depressed PD0 D3 | |
PD4 D4 | | A5 PF0
PC6 D5 | | A4 PF4
PD7 D6 | | A3 PF4
PE6 D7 | | A2 PF5
2 Count 16 PB4 IO8 | | A1 PF6
4 Count 32 PB5 IO9 | | A0 PF7
6 Count 64 PB6 IO10 | | AREF
PB7 IO11 | | 3V3
PD6 IO12 | | IO13 PC7
+-------+
The result:
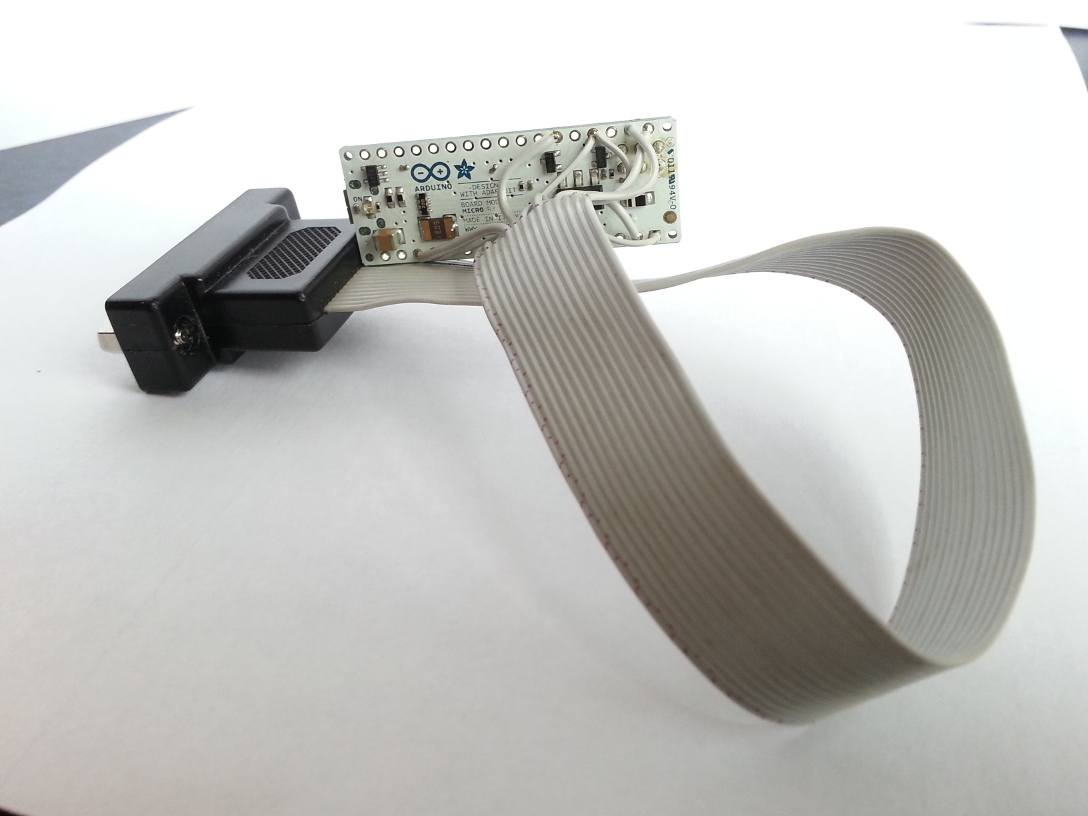
- DB15-ribbon-arduino.jpg (178.49 KiB) Viewed 5178 times
I have a collection of photos showing the internals of the Bigfoot. These were taken while cleaning, and reassembly photos show how I reinserted the space bar with the help of dental floss and a spanner. Photos will follow soon that will reveal how that odd combination worked.
Soarer explains that the IBM Bigfoot contains only a demultiplexer and a cap-sense chip, and no microcontroller. There's no need to rip any of the original electronics out to be replaced by the Arduino/Teensey, just connect to the original DB15 and cable, or plug directly into the 20-pin IDC connector on the Keyboard Logic Card (as it is called in the
5291 Maintenance Library manual for the IBM terminal).
I found another discussion about adapting the
Xwhatsit Grand Unified IBM Capsense USB Controller to be
used on the IBM Bigfoot. It seems that the lack of microcontroller was not noticed there. In effect, the Xwhatsit controller hardware also has a demultiplexer, and uses the ATMEL analogue comparator inputs to detect keypresses. The IBM Bigfoot provides this, and potentially the Xwhatsit ATMEL controller software code could be used after minor edits. I may try that to replace Soarer's Controller software.



{kind=link}